
The Controller Area Network (CAN) bus is a robust communication system widely used in various industries, especially in automotive and industrial automation.
It allows microcontrollers and devices to communicate with each other without a host computer, making it highly efficient and reliable for real-time applications.
By learning about CAN bus, you can gain valuable skills in designing, implementing, and troubleshooting network communication systems, opening doors to exciting career opportunities in these rapidly growing fields.
Finding the right CAN bus course on Udemy can be a bit overwhelming, considering the vast number of options available.
You’re likely seeking a comprehensive course that not only covers the theoretical foundations but also provides practical, hands-on experience.
You want a course taught by experienced instructors who can guide you through the complexities of CAN bus communication and equip you with the skills needed to succeed in this field.
Based on our thorough analysis, we recommend An Introduction to the Controller Area Network (CAN) Bus as the best overall course on Udemy for learning about CAN bus.
This course provides a comprehensive introduction to the CAN bus, covering its history, functionality, and practical applications.
It offers a perfect blend of theory and hands-on exercises, allowing you to build a solid foundation in CAN bus communication.
However, this is just one of the excellent options available.
We understand that different learners have unique needs and preferences, so we’ve compiled a list of other top-rated CAN bus courses on Udemy, each with its own strengths and focus areas.
Keep reading to explore these alternatives and find the perfect course that aligns with your learning goals and aspirations.
An Introduction to the Controller Area Network (CAN) Bus

This course teaches you why the CAN bus was invented and its many uses.
You’ll discover how the need for reliable communication in cars led to its creation and see a real-world example of it working in a vehicle.
You’ll then learn how the CAN bus allows multiple devices to share a single network without any messages getting lost or scrambled.
This involves diving into the CAN data packet – learning the role of each part, such as the message identifier, the data itself, and the acknowledge (ACK) field.
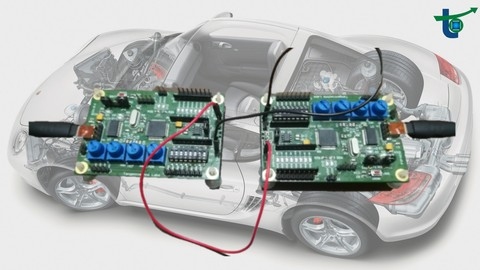
Next, you’ll get hands-on experience building a simple CAN bus network from scratch.
You’ll set up the hardware, program the CAN bus nodes, and use a tool called a VCAN bus analyzer to see the messages traveling across the network.
You’ll learn to read and understand each part of the CAN data packet, including the SOF, EOF, DLC, R0, IDE, and CRC fields.
Finally, the course covers the different types of CAN bus used worldwide.
You’ll explore the three main standards and even learn about more advanced systems built using CAN bus as their foundation.
Controller Area Network-Indepth analysis of CAN BUS/Protocol
This course begins with the background of CAN Bus, tracing its development and the issues it addresses.
You’ll then establish a foundation in embedded serial communication protocols, exploring essential concepts like UART, RS232, SPI Bus, and I2C Bus.
You’ll discover the mechanics of these protocols, their strengths, and their limitations, providing context for understanding the CAN Protocol.
With this groundwork laid, the course delves into the core of the CAN Protocol.
You will analyze its structure, key concepts, and real-world applications, particularly in automotive systems.
The course provides practical experience, allowing you to build and analyze CAN networks using a CAN self-learning kit, reinforcing your theoretical understanding with hands-on skills.
You will then explore higher-layer protocols like J1939 and ARINC 825, addressing the limitations of the basic CAN Protocol and enabling more sophisticated communication, particularly in automotive and aerospace industries.
This course provides a thorough understanding of CAN Bus technology, from its fundamental principles to practical applications across various industries, equipping you with the knowledge to analyze and build CAN networks.
How to Program an Arduino for CAN bus Network Communication

This course guides you through every step of using a CAN bus with your Arduino.
You begin by learning the essential hardware and software, like the Arduino Uno and Mega boards and the CAN bus shield.
The course then teaches you how to wire these components together, ensuring your devices can communicate correctly.
You then learn to write and test code for your Arduino I/O devices, which control how your system interacts with the outside world.
You’ll progress to designing your own CAN bus network, learning how multiple devices can communicate with each other.
The course provides hands-on experience writing code for both Arduino Uno and Mega to implement CAN bus communication.
This involves using specific libraries and commands to control how data is sent and received over the network.
Finally, you download the complete code and test the entire system, seeing your CAN bus network come to life.
You’ll gain a strong understanding of how to design and implement a functional CAN bus network with your Arduino, from basic wiring to complex communication protocols.
From Controller Area Network (CAN bus) to Real-Time System

This course equips you with a comprehensive understanding of Controller Area Network (CAN bus) technology and its role in real-time systems.
You delve into the core of the CAN protocol, exploring its technical intricacies, including the Bosch specifications that define its operation.
You gain a deep understanding of the physical layer, where you learn about bit encoding, how the system synchronizes bitstreams to ensure reliable communication, and the critical timing aspects of the protocol.
You then transition from theory to practical application by working with Arduino, a popular platform for embedded systems.
You learn how to connect a CAN controller to an Arduino board, write code to send and receive data, and test your setup.
This hands-on experience provides a solid foundation for building and debugging CAN-based applications.
You then explore the ISO 11898-1 and ISO 11898-2 standards, the industry benchmarks for CAN bus communication, ensuring your knowledge aligns with established practices.
The course then guides you through the process of designing real-time systems with CAN, focusing on schedulability analysis — a critical aspect of ensuring your system responds predictably and promptly.
You learn how to analyze timing constraints and optimize your designs for reliable real-time performance.
You are introduced to professional-grade tools such as SIEMENS Capital Networks for designing intricate CAN networks and CANDB++ for working with data files within these networks.
You also learn about the security challenges inherent in CAN-based systems, especially in the automotive domain, understanding vulnerabilities and gaining insights into common attack methods.
Mastering CAN bus System

This course on mastering the Controller Area Network (CAN) bus system equips you with the knowledge to excel in industries like automotive and industrial automation.
You will begin by tracing the evolution of CAN from its inception, understanding its significance in modern vehicles and beyond.
The course doesn’t shy away from the technical intricacies of CAN.
You will gain a deep understanding of fault confinement, a crucial safety feature, and the arbitration process that ensures smooth data flow.
The course dives into the core of CAN communication - the frames.
You will learn how data is packaged into different frame types, including data frames, remote frames, and error frames, each serving a specific purpose in data exchange.
You will also master the concept of bit stuffing, a method ensuring data integrity during transmission.
The curriculum emphasizes practical skills by explaining the twelve rules for managing error counts, a topic not frequently covered in other CAN courses.
You will then move on to the layered approach of CAN, which helps you comprehend how data travels efficiently across networks.
Finally, the course introduces you to CAN FD, a newer standard offering faster data rates and increased bandwidth.
This exposure to the latest technology ensures you stay ahead of the curve in this ever-evolving field.
The Essential Guide to Controller Area Network (CAN Bus)

This course equips you with a robust understanding of Controller Area Network (CAN Bus) technology.
You will learn how CAN Bus works, its purpose, and the advantages it offers.
This course is ideal if you are interested in automotive electronics, embedded systems, or robotics.
The course begins by establishing a solid understanding of CAN Bus fundamentals, covering its history, main components, and how it aligns with the OSI network model.
You will then explore different CAN Bus frame types, including data frames, remote frames, and error frames.
You will then learn about error handling in CAN Bus, including error types, error states, and the system’s error management processes.
Moving beyond the basics, the course delves into the Nominal Bit Time (NBT) and its segments, along with NRZ coding and bit stuffing—two critical elements of CAN Bus communication.
You will gain practical troubleshooting skills and develop a clear understanding of potential CAN Bus errors.
Controller Area Network (CAN bus) For Beginners (English)
This course takes you on a journey into the world of Controller Area Networks (CAN bus).
You begin by mastering the fundamentals of how CAN buses operate and their significance in modern vehicles.
You discover the different types of messages transmitted through the CAN bus, gaining a solid grasp of the CAN protocol.
You also learn about the “Error/Overload frame,” a critical component of the CAN bus’s error detection and handling system.
You then explore the various errors that can occur on a CAN bus, such as bit errors, stuff errors, CRC errors, acknowledgment errors, and form errors.
The course explains the “Error Confinement Mechanism,” which prevents these errors from disrupting the entire network.
You develop practical skills in “CAN Bit Monitoring” and “Stuffing,” essential for understanding and troubleshooting CAN bus systems.
This course equips you with the knowledge to work confidently with CAN buses across various applications.
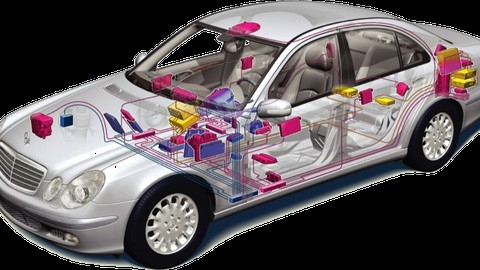
You learn about in-vehicle networks (IVNs) and the different types of CAN messages, including data frames and remote frames.
You delve into the CAN protocol’s structure, strengths, and real-world applications.