The Robot Operating System (ROS) is a powerful open-source framework widely used in robotics research and development.
It provides a standardized set of tools and libraries for building complex robotic applications, handling tasks like navigation, perception, and control.
Learning ROS can open doors to exciting careers in robotics, allowing you to contribute to groundbreaking innovations and solve real-world problems.
Finding a high-quality ROS course on Udemy that meets your specific needs can be a daunting task, with so many options available.
You’re looking for a course that provides a comprehensive understanding of ROS, goes beyond theory with hands-on projects, and is taught by experienced instructors.
We’ve carefully reviewed numerous Udemy courses and recommend ROS for Beginners: Basics, Motion, and OpenCV as the best overall choice.
This course stands out for its comprehensive coverage of fundamental ROS concepts, practical projects using the Turtlesim simulator, and its exploration of key areas like motion control, computer vision with OpenCV, and interfacing with real-world hardware through rosserial.
While this is our top pick, there are other fantastic options available on Udemy for different levels and interests.
Keep reading to discover more recommendations and find the perfect ROS course for your journey.
ROS for Beginners: Basics, Motion, and OpenCV

This ROS for Beginners course provides a thorough introduction to the Robot Operating System (ROS), equipping you with the foundational knowledge and practical skills to embark on your robotics journey.
You’ll start by understanding ROS’s core architecture, communication paradigms, and its revolutionary impact on robotics software development.
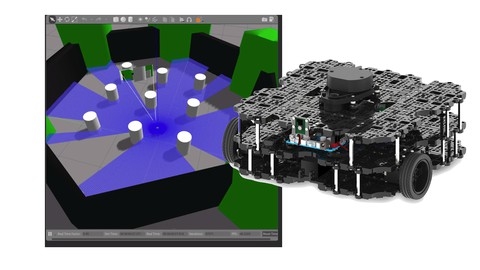
The course utilizes Turtlesim, a simulated robot environment, to illustrate key concepts like ROS computation graphs, nodes, topics, and services.
This hands-on approach allows you to grasp these concepts in a practical setting.
Moving beyond the fundamentals, you’ll delve into motion control, learning how to program robots to move in straight lines, rotate, and navigate to specific locations.
You’ll gain proficiency in writing code using both Python and C++ to control robot movement, culminating in the development of a simulated cleaning application that integrates these motion skills.
The course further explores the world of perception, introducing you to computer vision using OpenCV.
You’ll learn to leverage OpenCV for tasks such as image processing, object detection, and color filtering.
A practical example of detecting tennis balls in a simulated environment demonstrates the application of these skills.
Beyond computer vision, you’ll gain knowledge of laser range finders, their characteristics, and how to integrate them into ROS-based robotic systems.
Finally, the course bridges the gap between ROS and real-world hardware through rosserial.
This powerful tool allows you to connect microcontrollers like Arduino to ROS, enabling the creation of robots that interact with their physical environment.
You’ll learn to program an Arduino Uno with rosserial and an ultrasonic range sensor, gaining valuable experience in bridging the digital and physical realms.
You’ll be prepared to apply your newfound knowledge to real-world scenarios and continue your exploration of the exciting field of robotics.
ROS2 For Beginners (ROS Foxy, Humble - 2024)
You’ll start by installing ROS2 Humble on Ubuntu 22.04, a process that’s clearly explained and supported by detailed instructions.
You’ll quickly get your hands dirty with ROS2 programming in both Python and C++, exploring object-oriented programming principles to build efficient and reusable code.
The course covers essential ROS2 concepts like topics, services, and parameters, providing practical examples of how to create publishers and subscribers for data exchange, implement client-server communication using services, and dynamically manage node settings through parameters.
You’ll learn to build custom message and service interfaces using Msg and Srv files, enabling you to define your own data structures and communication protocols.
The course also delves into the power of ROS2 launch files, allowing you to manage multiple nodes and configure your ROS2 applications efficiently.
A key highlight of the course is the hands-on project where you’ll use the learned concepts to control a turtle in the Turtlesim environment.
By leveraging topics, services, parameters, and launch files, you’ll create a robust and interactive application.
This project effectively reinforces your understanding of the core concepts and provides a tangible example of how ROS2 can be applied.
The course doesn’t stop at the project.
You’ll gain additional knowledge on saving and replaying topic data with ROS2 bags, giving you powerful tools for analyzing and debugging your ROS2 projects.
This added content provides valuable insights into real-world ROS2 development workflows.
ROS For Beginners (ROS Noetic, Melodic, Kinetic)

This course is a solid introduction to ROS, the powerful open-source framework driving robotics development.
You’ll dive into the world of ROS, starting with the essentials: setting up your environment, understanding the ROS Master, and navigating the foundational concepts of nodes, topics, and services.
The curriculum walks you through creating ROS nodes using both Python and C++, equipping you to build the building blocks of your robotic applications.
You’ll learn by doing, experimenting with the engaging Turtlesim environment to solidify your grasp of ROS communication mechanisms.
As you progress, you’ll explore customization through Msg and Srv files, allowing you to define your own data formats and communication protocols for your projects.
You’ll learn how to leverage ROS parameters and launch files, crucial tools for managing and scaling your ROS applications.
The course goes beyond the basics, delving into advanced topics like working with ROS bags for data recording and replay, and exploring object-oriented programming techniques within the ROS context.
ROS for Beginners II: Localization, Navigation and SLAM
This course provides a comprehensive dive into the world of robot navigation using ROS, specifically focusing on the latest version, ROS Noetic.
You’ll gain hands-on experience utilizing Turtlebot3, a popular robotics platform, as you explore key concepts like localization, SLAM, and map-based navigation.
You’ll begin by delving into localization, the process of determining a robot’s position within its environment.
The course covers essential concepts like frames of reference and transformations, and introduces you to the powerful TF package, which allows you to manage these intricacies.
Next, you’ll explore SLAM (Simultaneous Localization and Mapping), a technique for creating maps of unknown environments while simultaneously tracking the robot’s position within those maps.
This section will familiarize you with ROS tools like “view_frames” and “tf_monitor,” which provide visual representations and real-time monitoring of these transformations.
The course then moves on to map-based navigation, where your robot utilizes a previously generated map to plan its path.
You’ll gain a deep understanding of the Navigation Stack, a collection of ROS nodes designed to handle navigation tasks.
The course also dives into the Dynamic Window Approach (DWA) algorithm, a real-time path planner that helps your robot navigate obstacles.
You’ll learn how to fine-tune the Navigation Stack parameters to optimize your robot’s performance.
Finally, the course delves into reactive navigation, where robots navigate without relying on pre-existing maps.
You’ll explore techniques like the BUG algorithms, which allow robots to effectively navigate complex environments using simple rules.
This course provides a strong foundation in ROS navigation, equipping you with the knowledge and skills to design and implement autonomous navigation systems for a wide range of robotic applications.
ROS2 for Beginners Level 2 - TF | URDF | RViz | Gazebo

You’ll journey from novice to expert, learning foundational concepts and advanced techniques that will empower you to create your own robotic marvels.
The course starts with the core of ROS: the Transform library (TF).
You’ll discover how TF manages the positions and orientations of robot components, visualizing these relationships in RViz and understanding the interconnectedness of a TF tree.
You’ll learn to leverage TF to solve real-world problems in robotics, laying the groundwork for your future projects.
Next, you’ll delve into URDF, the Unified Robot Description Format, which defines the physical structure of your robots.
You’ll learn to create basic URDF files, add visual flair with colors and materials, and connect different components with various types of joints.
The course provides a systematic approach to constructing URDFs, ensuring you get it right from the start.
You’ll then explore the Robot State Publisher, a tool that broadcasts the state of your robot in real-time.
You’ll learn to create robot description packages to store your URDFs, and write launch files for seamless setup.
You’ll also discover the power of Python launch files for streamlined robot control.
The course introduces Xacro, a powerful tool for creating complex and reusable URDF files.
You’ll learn to define variables and macros, enabling you to easily manage and modify your robot descriptions.
You’ll also learn to leverage Xacro’s modularity by including files within other files, enhancing code organization and reusability.
You’ll then dive into the exciting world of Gazebo, a realistic 3D environment for robotics simulation.
You’ll learn to add inertia and collision tags to your URDFs, enabling your robot to behave realistically in the virtual world.
You’ll master the art of spawning robots in Gazebo, adding sensors like cameras, and utilizing Gazebo plugins to control your robot’s behavior.
The course concludes with a final project, where you’ll synthesize your knowledge to create a sophisticated robot.
You’ll learn to adapt your robot for Gazebo, integrate Gazebo plugins, and even combine multiple robots, demonstrating your mastery of the skills you’ve acquired.
The structured approach, coupled with hands-on exercises, will equip you with the knowledge and confidence to take your robotics journey to the next level.
ROS2 Robotics Developer Course - Using ROS2 In Python
You’ll start with the essentials, setting up your environment on Ubuntu 22.04, and installing ROS 2 Humble, the popular distribution designed for robotics.
The course then delves into the core concepts of the ROS 2 framework, covering everything from creating workspaces to building publishers and subscribers, allowing you to communicate data between different parts of your robot.
You’ll learn to use Python, the go-to language for ROS development, and get hands-on experience with real-world projects.
Beyond the basics, you’ll dive into powerful simulation tools like Gazebo and Ignition Gazebo, which allow you to create realistic virtual environments for your robot.
You’ll learn to model robots and their surroundings using SDF, a common format for describing robotic systems.
This section also covers working with sensors and plugins, crucial for simulating realistic robot interactions with the environment.
The course concludes with a dive into advanced ROS 2 features, such as security configurations and building ROS 2 from source.
You’ll also learn how to connect ROS 2 with ROS 1, a valuable skill if you are working with legacy robots.
Robotics and ROS 2 - Learn by Doing! Manipulators

You’ll start by learning how to install ROS 2 on Ubuntu, a popular operating system for robotics, and dive into the fundamentals of ROS 2, including nodes, topics, and messages.
You’ll then create your own ROS 2 applications, learning to write publishers and subscribers for sending and receiving data between different parts of a robotic system.
You’ll also gain a thorough understanding of URDF, the language used to describe the physical structure of robots.
The course utilizes Gazebo, a powerful robotics simulator, to create a digital twin of your robot, enabling you to test your code and algorithms without needing to build physical hardware.
You’ll learn how to create your robot in Gazebo and use it to test different control algorithms, making it a valuable tool for experimentation and development.
You’ll also delve into MoveIt! 2, a library for planning and controlling robot movements.
MoveIt! 2 enables you to create complex tasks like picking up objects and moving them to different locations, making it a powerful tool for robotic manipulation.
Beyond traditional robotics, the course explores the exciting world of voice control by showing you how to integrate your robot with Alexa, Amazon’s popular voice assistant.
You’ll learn to develop Alexa skills and use voice commands to interact with your robot, adding a new dimension to robotic control.
The course also covers the latest advancements in robotics, including Arduino and ROS 2 integration, enabling you to build robots that interact with the real world.
You’ll learn how to create publisher and subscriber nodes for Arduino, allowing your robot to interface with various sensors and actuators.
This course provides a solid foundation in ROS 2, empowering you to build your own robotic applications and explore the rapidly evolving world of robotics.
You’ll acquire valuable skills highly sought after in the robotics industry, making this a valuable investment for those seeking a career in this dynamic field.
Self Driving and ROS 2 - Learn by Doing! Odometry & Control

This course offers a comprehensive and practical introduction to building self-driving robots using ROS 2.
You’ll embark on a hands-on journey, starting with the fundamentals of setting up Ubuntu and ROS 2 on your computer.
Whether you prefer a virtual machine or a dual-boot system, the course guides you through the installation process step-by-step.
You’ll gain a deep understanding of the ROS 2 architecture, exploring topics like hardware abstraction, low-level device control, and efficient message passing.
You’ll then dive into the exciting world of robot locomotion, where you’ll learn to design your robot’s 3D model using URDF and visualize it in action with Rviz 2.
The course equips you to launch realistic robot simulations in Gazebo, a powerful tool for testing your self-driving software.
Building upon this foundation, you’ll delve into the core concepts of robot control using ROS 2 Control.
You’ll master the principles of kinematics, including translation vectors, rotation matrices, and the TF2 library, which allows you to track your robot’s position and orientation with precision.
The course emphasizes the importance of odometry in self-driving robots, providing practical guidance on implementing it with ROS 2.
You’ll also explore sensor fusion, a vital aspect of robot perception.
The course delves into Kalman filters and Extended Kalman filters, powerful tools for combining data from multiple sensors to improve your robot’s understanding of its environment.
Finally, you’ll gain valuable hands-on experience by building your own robot using Arduino, a popular microcontroller platform.
You’ll learn to connect DC motors and encoders to Arduino and integrate them seamlessly with ROS 2.
You’ll be well-equipped to tackle real-world robotics projects and contribute to the exciting future of autonomous systems.