Real-Time Operating Systems (RTOS) are the backbone of embedded systems that demand precise timing and responsiveness.
From industrial automation and robotics to automotive systems and consumer electronics, RTOS ensures that tasks are executed predictably and efficiently.
Learning RTOS opens up a world of opportunities in embedded systems development, allowing you to design and implement complex systems that meet stringent real-time requirements.
With the growing demand for skilled embedded systems engineers, finding the right RTOS course can be overwhelming.
You’re looking for a course that not only covers the theoretical foundations but also provides hands-on experience with popular RTOS kernels and microcontrollers.
You want a course that’s comprehensive, engaging, and taught by experienced instructors who can guide you through the intricacies of real-time programming.
After carefully reviewing numerous Udemy courses, we’ve found that the best course overall for learning RTOS is Mastering RTOS: Hands on FreeRTOS and STM32Fx with Debugging.
This course offers a comprehensive and practical approach to learning FreeRTOS, one of the most widely used RTOS kernels, on STM32 microcontrollers.
It’s packed with hands-on projects, debugging techniques, and real-world examples, making it the perfect choice for anyone looking to master RTOS.
While Mastering RTOS: Hands on FreeRTOS and STM32Fx with Debugging is our top pick, there are several other excellent RTOS courses available on Udemy.
Depending on your specific interests and learning style, you might prefer a course that focuses on a different RTOS kernel or delves deeper into specific aspects of real-time programming.
Keep reading to explore our other recommendations and find the perfect RTOS course to launch your embedded systems career.
Mastering RTOS: Hands on FreeRTOS and STM32Fx with Debugging

You’ll start by understanding the fundamental differences between RTOS and general-purpose operating systems (GPOS), exploring key concepts like task scheduling, latency, and priority inversion.
The course emphasizes a hands-on approach.
You’ll work directly with the STM32 microcontroller and the FreeRTOS kernel, creating projects from scratch.
You’ll gain practical experience with task creation, scheduling, and task state management.
SEGGER SystemView, a powerful trace tool, is integrated to help you analyze your code and visualize the inner workings of the RTOS.
As you progress, the course delves into essential topics like task synchronization, mutual exclusion, and interrupt management.
You’ll learn to use semaphores and mutexes to protect critical sections of code, ensuring smooth system operation.
You’ll also gain a solid understanding of how RTOS handles interrupts and develop the skills to write interrupt-safe code.
The course culminates in the exploration of advanced features like FreeRTOS queues and software timers, allowing you to build complex and responsive applications.
You’ll also be introduced to FreeRTOS+Simulator, which enables you to run your code in a simulated environment without needing physical hardware.
Build Your Own RealTime OS (RTOS) From Ground Up™ on ARM 1

If you’re seeking a deep dive into building your own real-time operating system (RTOS) from the ground up, this course offers a comprehensive and practical approach.
You’ll start by setting up your development environment, choosing between CubeIDE and Keil uVision 5, and then delve into the core concepts of microcontroller programming.
This includes mastering the art of creating essential drivers, like those for LEDs and UART communication, which are fundamental building blocks for any RTOS.
You’ll gain a solid understanding of the Cortex-M architecture, particularly the SysTick timer, which plays a crucial role in RTOS timing mechanisms.
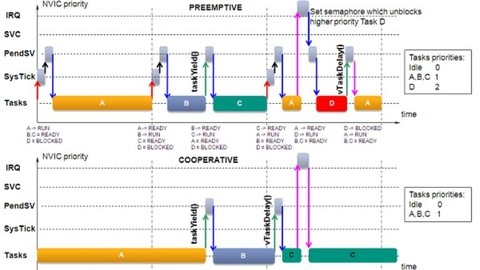
The course then guides you through the intricacies of scheduling algorithms, comparing and contrasting approaches like First Come First Served (FCFS), Round Robin (RR), and Weighted Round Robin (WRR).
You’ll learn to implement a Round Robin scheduler for your own RTOS, gaining hands-on experience with thread control blocks and context switching.
You’ll explore other scheduling paradigms, such as cooperative and periodic schedulers, and gain exposure to concepts like semaphores for inter-thread communication.
This course is ideal for those who want a hands-on, in-depth understanding of RTOS design and implementation.
FreeRTOS From Ground Up™ on ARM Processors (REVISED)

This course is a comprehensive exploration of FreeRTOS on ARM processors, designed to take you from beginner to confident developer.
You’ll start by grasping the fundamentals of real-time operating systems (RTOS) and how they differ from other systems.
You’ll then dive into the practical aspects, setting up your development environment using STM32CubeIDE and learning to install necessary packages.
The course then delves into the core of FreeRTOS, covering task management, queues, semaphores, and software timers.
You’ll learn how to create tasks, manage queues, and use semaphores to synchronize them effectively.
The syllabus also covers FreeRTOS’s interrupt management and event groups, enabling you to handle interruptions and effectively communicate between different parts of your applications.
It then delves into CMSIS-RTOS, a set of generic APIs for working with RTOS on Cortex-M microcontrollers.
This section guides you through coding to create threads, manage priorities, and leverage various synchronization mechanisms like mutexes and semaphores.
Throughout the course, you’ll get hands-on experience with development boards like the STM32F4-DISCOVERY, STM32F4-NUCLEO, and TM4C123 Tiva C LaunchPad, learning to build real-time firmware.
Introduction to Real-Time Operating System (RTOS)
You’ll delve into the core concepts behind RTOS, such as the Super Loop and foreground/background execution, gaining a clear understanding of the different types of RTOS kernels.
The course then focuses on the popular uCOS-II, providing a detailed exploration of its architecture and functionalities.
The course guides you through the practical aspects of setting up a development environment, enabling you to implement your newly acquired knowledge.
You’ll gain a deep understanding of multitasking, a crucial feature of RTOS, learning how to define tasks, manage their states, and implement task creation and deletion.
The course further explores essential concepts like task scheduling and the effective management of shared resources.
You’ll learn about crucial synchronization mechanisms like semaphores and mutexes, ensuring the smooth operation of tasks and the protection of shared resources.
You’ll delve into inter-task synchronization techniques, exploring the use of event flags and message queues for efficient communication between tasks.
The course also covers the use of mailboxes for inter-task communication and introduces you to software timers for managing time-based events.
Embedded Systems Bootcamp: RTOS, IoT, AI, Vision and FPGA
This bootcamp is a comprehensive journey through the world of embedded systems, taking you from foundational concepts to advanced applications.
You’ll begin by building a solid understanding of digital circuits and logic gates, learning how to use VHDL for hardware design.
This foundational knowledge paves the way for microcontroller programming, using the Arduino platform to explore digital and analog input/output, communication protocols like UART, and the implementation of interrupts.
The bootcamp seamlessly integrates IoT concepts, introducing you to the NodeMCU and ESP32 platforms.
You’ll learn how to establish a Node-Red environment and use MQTT to connect your devices to the internet, enabling remote control via an Android app.
This hands-on experience solidifies your understanding of creating connected and interactive systems.
Next, the bootcamp delves into the world of real-time operating systems (RTOS), teaching you how to create multi-tasking applications and manage resources using semaphores, mutexes, and queues.
This knowledge allows you to build more complex and efficient embedded systems, addressing the demands of modern applications.
Finally, you’ll venture into the exciting realm of AI and machine learning.
The bootcamp explores neural networks and convolutional neural networks (CNNs), guiding you through the process of training your own models using libraries like Keras and TensorFlow.
This is where the course truly distinguishes itself, providing practical knowledge of implementing AI models on embedded platforms, opening a door to a vast array of exciting possibilities.
The bootcamp’s depth and focus on practical application are its strongest assets.
While the curriculum provides a solid foundation in theory, it primarily emphasizes hands-on learning, enabling you to build working projects and gain practical skills directly applicable to real-world scenarios.
This approach ensures you’re not only equipped with theoretical knowledge but also with the ability to apply it effectively in your projects.
Introduction to AUTOSAR/OSEK RTOS I

You’ll gain a solid foundation in the OSEK development process and learn how to use the OIL configuration file to tailor the OSEK OS to your embedded system’s needs.
The course delves into the intricacies of task management, providing clear explanations of concepts like Task Concept and its properties, State Transitions, and OSEK Conformance Classes.
You’ll gain a practical understanding of these concepts through numerous scheduling and execution examples, allowing you to see how they apply in real-world scenarios.
The course also covers OSEK Scheduling Policies, helping you understand the different approaches and choose the best one for your projects.
Beyond task management, you’ll explore the crucial area of Resource Management.
You’ll learn about shared resources, data inconsistency problems, and how semaphores help regulate access.
The course tackles the complex issues of Priority Inversion and Deadlock, providing insights into their causes and effective solutions.
You’ll gain hands-on experience with these concepts through practical examples, including scheduling, C code implementation, and execution.
This course presents a robust learning experience, providing you with the necessary knowledge and skills to work with the OSEK OS.
Introduction to AUTOSAR/OSEK RTOS II

This AUTOSAR course dives into the core concepts of real-time operating systems as they are applied in automotive software development.
You’ll gain practical experience through hands-on examples utilizing the OSEK operating system.
For instance, you’ll explore the differences between absolute and relative alarms, and learn to leverage the OIL (OSEK Implementation Language) to define them.
You’ll also work through examples of event control, exploring the dynamic interaction between events, the scheduler, and server tasks.
The course even introduces the powerful concept of hook routines, allowing you to execute specific code at key points in the operating system’s lifecycle.
This course provides a strong foundation in the fundamentals of OSEK RTOS, equipping you with the essential tools and knowledge for building robust automotive software.
However, remember that this course serves as a starting point.
Further exploration and practical experience will be necessary for a deep mastery of AUTOSAR/OSEK RTOS.
Build Your Own RealTime OS (RTOS) From Ground Up™ on ARM 2
You’ll start with a solid foundation, revisiting the basics of the Round Robin Scheduler and fundamental RTOS concepts.
Then, the course dives deep into the core of RTOS development by guiding you through the creation of the osKernel files, the heart of your custom RTOS.
You’ll be writing essential functions like osKernelInitialization, osKernelAddThreads, and osKernelLaunch, which are vital for setting up and managing your threads.
The course then introduces you to a range of scheduling techniques, including Periodic Scheduling (Types 1-4), Sporadic Scheduling, and Priority Scheduling, providing you with a comprehensive understanding of their strengths and weaknesses.
You’ll learn how to implement these techniques effectively within your RTOS.
The course goes beyond just the software, delving into the intricacies of the ARM architecture, covering concepts like RISC, the AMBA bus, and memory management.
You’ll explore different processor modes, registers, and data types, gaining a solid understanding of how your RTOS interacts with the hardware.
This includes concepts like cache and tightly coupled memory, essential for optimizing performance.
Finally, the course focuses on practical aspects, guiding you through setting up your development environment with Keil uVision 5 and installing necessary packs.
You’ll even learn to build a UART driver for monitoring your RTOS and create a Finite State Machine, a powerful tool for designing complex systems.
This course offers a comprehensive learning experience, equipping you with the skills and knowledge needed to build your own RTOS.